 ウーバーの事故から5日後、テスラ・モデルXが高速道路の中央分離帯に激突。オートパイロット中の事故は昨年に続いて2度目だ
ウーバーの事故から5日後、テスラ・モデルXが高速道路の中央分離帯に激突。オートパイロット中の事故は昨年に続いて2度目だ自動運転の実用化とその覇権をめぐって、従来の自動車メーカーだけでなくIT企業も巻き込んだ研究開発が激しさを増すなかで、ついに起こってしまった自動運転車による歩行者の死亡事故。
今回の事故をどうとらえればいいのか? そして自動運転のあるクルマ社会とはなんなのか? 専門家とともにガチでその答えを探し求めた!
■監視役ドライバーが監視していなかった
ついに「その日」が来てしまった。3月18日、アメリカのアリゾナ州テンピでITベンチャー企業「Uber」(以下、ウーバー)の自動運転実験車両が、道路横断中の歩行者をはねて死亡させる事故が発生したのだ。
事故が起きたのは、現地時間の22時頃。4月12日時点で事故の詳細は明らかにされていないが、地元警察が公開した車載カメラの映像を見る限り、ボルボXC90を改造したウーバーの自動運転車は左手から自転車を押して道路を横断しようとした歩行者にまったく反応することなく、時速40マイル(約64キロ)で歩行者と衝突している。
ちなみに、この事故の5日後には、同じくアメリカのカリフォルニア州で「オートパイロット」と呼ばれる部分的な自動運転(レベル2)を使用中だった市販車のテスラ・モデルXが、高速道路の中央分離帯に衝突して爆発炎上する事故が発生。ドライバーが死亡した。オートパイロット使用中の死亡事故は、昨年5月に続いて2件目だ。
もちろん、ドライバーが運転に関与しない高度な自動運転の実験中だったウーバーの事故と、あくまで運転の主体がドライバーにあるテスラの事故とでは条件が同じではないが、アメリカで立て続けに起きた死亡事故が、世界で過熱する自動運転の開発に与えた衝撃は小さくない。
ウーバーの事故は、なぜ起こってしまったのか?
「まず断っておきたいのは、事故を起こしたのは『自動運転車』ではなく『ウーバーが公道上で自動運転の実験を行なっていたクルマ』だということです」と語るのは、自動車ジャーナリストで内閣府のSIP(戦略的イノベーション創造プログラム)自動走行システム推進委員会構成員の清水和夫氏だ。
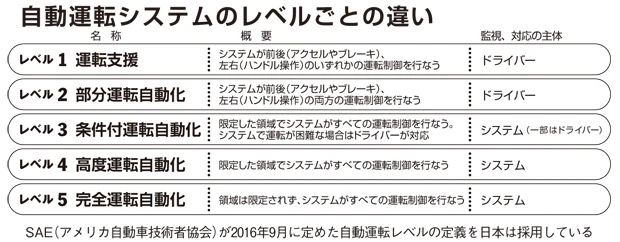
「事故を起こした実験車両は、SAE(アメリカ自動車技術者協会)が定めた自動運転の区分でいえば、『レベル3』や『レベル4』のシステムを搭載していたとされています。このふたつのレベルは運転の主体は基本的にシステムで、自動運転中はドライバーに監視の義務はありません。
しかし、実際にはまだ、ドライバーがすべての運転操作をシステムに任せて前方を監視しなくても公道を走れる『完全自動運転車』は存在しません。つまり、公道である以上、仮にレベル4のシステムが搭載されていたとしても、それはあくまでデータを集めるための『試験走行』ですから、当然、ドライバーには監視の義務があるのです。
ところが公開された車載映像を見ると、ドライバーは事故直前まで前方を見ていません。その意味で、事故は明らかな『人災』だといえます。つまり実験中になんらかの問題があったとき、それに対処しなければならないドライバーによる監視が正しく行なわれていなかった。それが今回の事故の第一義的な問題点です」(清水氏)
『自動運転車だからこそ防げた事故』であるべき
■自動運転だからこそ事故は防げたはず?
では、ウーバーの実験車両に乗っていた監視役のドライバーが、きちんと前方を注意していれば、あの事故は防げたのだろうか?
「本来なら『自動運転車だからこそ防げた事故』であるべきだった」と指摘するのは、名古屋大学で運転支援システムや自動運転の研究に携わる平岡敏洋特任准教授だ。
「車載映像を見ると、事故を起こしたクルマのヘッドライトは『ロービーム』で走っています。街灯も少ない郊外の直線道路ですから、『ハイビーム』に切り替えて走行すべきだと思います。しかし、ロービームのままであれば、仮に人間が運転していたとしても、暗い道路脇から飛び出してきた歩行者との事故を避けられたかどうかはわかりません。
逆の言い方をすれば、『視界』が決して良好ではない状況だったからこそ、最新のセンサーを搭載した自動運転車が危険を察知し、対応できることが期待されていたケースだといえるかもしれません」
レベル3、4に相当する高度な自動運転の実験を行なうクルマの場合、レーザー光線を照射して周囲の物体の形状を細密に感知する「3D LiDAR」(以下、ライダー)という装置を搭載し、それに光学カメラやミリ波レーダーなど、複数のセンサーを併用している場合が多いという。
なかでもライダーは、肉眼やカメラでは感知できないような暗闇でも、100m以上先の物体の形状を正確にスキャンすることが可能な自動運転のキーテクノロジーのひとつ。近年、日本でもコニカミノルタやパイオニアなどが開発に参入している。
事故を起こしたウーバーの車両にも、この技術で世界のトップを走るアメリカ・ベロダイン社のライダーが搭載されていたといわれており、200m先の物体を感知可能な最新型だったとの情報もある。
「おそらく最新のライダーを搭載していたにもかかわらず、事故を起こしたクルマはなぜ歩行者を感知できなかったのか? その原因は不明ですが考えられるものとして、『ライダーは歩行者を感知していたのにウーバーのシステム側が横断中の歩行者と認識しなかった』『センサーそのものになんらかの不具合があった』あるいは『ライダーと光学カメラといったほかのセンサーとの統合処理がうまく機能しなかった』などが挙げられます。
いずれにせよ今後、自動運転中にドライバーが監視する必要がない自動運転を目指すのであれば、当然、避けられなければならなかった事故です。ところが、今回の実験車両はそれに対応できなかった。ある意味、それが『自動運転車の現在地』を示しているのではないでしょうか。
その一方、あらゆる条件下でのデータを収集し、自動運転車の市販化、実用化に向けた課題や問題点を洗い出すためには、今後もより多くの公道実験が必要になります。こうした不幸な事故を防ぐために、なんらかの手立てが必要なことは明らかです」(平岡氏)
●後編⇒ついにウーバーの自動運転実験車両で死亡事故!「技術が進歩するほどシステムに依存する」
(取材・文/川喜田 研 取材協力/平岡敏洋(名古屋大学) 写真/アフロ)