 二輪姿勢制御システム「ライディングアシスト2.0」搭載! 停止状態のままライダーが両手両足を離してもバイクは倒れず。ホンダが二足歩行ロボット「ASIMO」のバランス制御技術を用いて開発した
二輪姿勢制御システム「ライディングアシスト2.0」搭載! 停止状態のままライダーが両手両足を離してもバイクは倒れず。ホンダが二足歩行ロボット「ASIMO」のバランス制御技術を用いて開発した
ホンダが停止時に支えがなくても倒れないバイクを公開した。モーターサイクルジャーナリストの青木タカオ氏が現地で実物を徹底チェックし、開発トップを直撃した!
■4年で超絶進化した"倒れないバイク"
昨年11月25日、ホンダが4年ぶりとなる"自立バイク"を報道陣に公開した。人が乗っていない状態で佇(たたず)むバイクはスタンドがかかってないのに直立姿勢のままピタッと止まったままだ。そこに人が乗ると、足を地面に着けずともマシン自ら姿勢を整え、転倒どころかバランスを崩す気配すらない。
そして歩行より遅い極低速で旋回し、さらになんと後進まで披露! ホンダ「NM4」をベースにした車体はオール電化され、聞こえるのはモーター音のみだ。
今回発表が行なわれた場所は、栃木県にある本田技研工業の「栃木プルービンググラウンドさくら」のテストコース。ココは2016年4月に開設されたテストコースで、広さは東京ドーム4.5個分! ホンダが誇る先進安全技術の開発拠点である。
なぜホンダは自立バイクの開発を続けているのか。それは、バイク乗車時の転倒の不安を軽減し、多くの人に安心で快適な二輪ライフを提供したいというホンダの理想を現実に落とし込むためだ。
4年前に米国の国際家電見本市「CES」で初公開された自立バイクは、自動でフロントフォーク(バイク前部のサスペンション)の取り付け角を可変させ、せわしなくステアリングを調整していた。
 2017年に発表のコンセプトモデルホンダ ライディング「アシストe」。ヒューマノイドロボットの研究で培った技術を用いて、米ラスベガスの家電見本市「CES2017」で世界初公開。ベストイノベーション賞などを受賞
2017年に発表のコンセプトモデルホンダ ライディング「アシストe」。ヒューマノイドロボットの研究で培った技術を用いて、米ラスベガスの家電見本市「CES2017」で世界初公開。ベストイノベーション賞などを受賞
しかし今回登場した最新版は、「ライディングアシスト2.0」にアップデート。4年の時を経て超絶進化した。大コーフンのアオキは、本田技術研究所・先進技術研究所の秋元一志チーフエンジニアを直撃した。
■自動化、無人化は考えていない
――そもそもバイクが自立するメリットってなんですか?
秋元 二輪車は高速走行で安定し、低速になるにつれて姿勢が不安定になる。停止時は足で支える必要がありますし、極低速では慎重に操作しなければいけません。
――確かに二輪車は排気量が大きくなるにつれ、いわゆる"立ちゴケ"の発生率が高くなります。
秋元 それを解決しようと、二足歩行ロボット「ASIMO」の姿勢安定化技術を応用して開発しました。
 本田技術研究所先進技術研究所チーフエンジニア 秋元一志(あきもと・かずし)氏 。「ライダーとマシンの一体センシングと車体揺動制御により、自然な操縦が可能になりました」と話す秋元氏。バージョン3.0へ向け開発は続く
本田技術研究所先進技術研究所チーフエンジニア 秋元一志(あきもと・かずし)氏 。「ライダーとマシンの一体センシングと車体揺動制御により、自然な操縦が可能になりました」と話す秋元氏。バージョン3.0へ向け開発は続く
――ただ、バイクという乗り物は不安定さを自在に操るのが醍醐味(だいごみ)のひとつです。そこに関してはいかがです?
秋元 おっしゃるとおりです。意のままに操縦できるのが二輪車の大きな魅力です。しかし、先ほども言いましたが、停止時や極低速時はどうしても不安定さが強く出てしまう。それならばと姿勢制御技術を加えてみると、今度は乗り手の意に沿わない動きが出て操縦がつまらなくなってしまう。
そこで今回はロボティクスの知見をさらに用いて、姿勢制御による安全性向上と、二輪車ならではの意のままに操れるライディングの楽しさを両立させました。
――具体的にバランスはどう保っているんですか?
秋元 人間なら足の裏の接地点を微妙に移動させたり、重心をズラす動きを組み合わせ、バランスを保っているのですが、考え方は二輪車も同じです。タイヤの接地面と車体の重心でバランスを取っています。
2017年に発表したバージョンは前輪を前に出したり、ハンドルを自動で左右に動かすことでタイヤの接地点や重心を動かし、自立させていましたが、ステアリングが自動制御なので乗り手が行きたい方向へハンドルを操作すると大きな違和感が出た。
そこで、新たに後輪に車体を揺動させる機構を追加し、重心位置を自由に変化させるようにしました。
――最新版はハンドルがほとんど動きません。その代わり、リアを細かく揺さぶっている。平たく言うとお尻をフリフリさせてバランスを取っているのが見てわかりました。
秋元 さらに従来は車体の傾斜角を検知し、倒れないよう制御していましたが、最新版は乗り手がどのぐらいカラダをズラしたのかも推定し、ライダーとマシンの一体センシングを行なっています。ハンドル操作も車体の寝かし込みも、より自由に自然になりました。
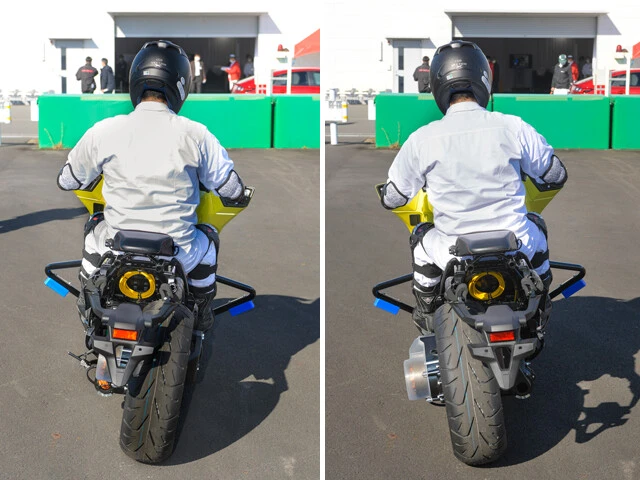 お尻を左右にフリフリさせてバランスを保つ。リアに備えた揺動装置が、倒れようとする逆の方向へ車体を起こすよう後部を細かく連続して左右に振る。タイヤ接地点と車体の重心をズラすことで転倒を防ぎ、自立を保つ
お尻を左右にフリフリさせてバランスを保つ。リアに備えた揺動装置が、倒れようとする逆の方向へ車体を起こすよう後部を細かく連続して左右に振る。タイヤ接地点と車体の重心をズラすことで転倒を防ぎ、自立を保つ
――いつ頃、市販モデルに導入する予定ですか?
秋元 未定です。まだ大きな基盤ができたばかりで、これからさまざまなシチュエーションに対応していく段階です。
――四輪車と違い、乗り手の技能やクセで二輪車は操作性が大きく異なります。そこの対応が難しい気がしますが?
秋元 そうなんです。実はここまでの開発でも、乗る人によって「コッチがイイ」という人もいれば、「いや、コレはダメだ」と意見がかなり分かれてしまうんです。
――仮に市販する場合、現時点での想定ユーザーは?
秋元 ビギナーや小柄で力の弱いライダーという考えはありますが、あらゆる人を想定しています。
――まずは停止時などに限定して今回の自立技術を用いたらよいのでは?
秋元 いろいろな可能性を考えるなかに、それももちろん含んでいます。どこから着手していくかは検討中です。
――ちなみに、システム稼働時にムリヤリ押し倒すことはできるんですか?
秋元 可能です。絶対に倒れないというものではありません。二輪車の場合、直立したままより倒れたほうがイイという場合もありえる。ゆっくり転倒させるとか、倒し方を含めたあらゆるケースを研究・開発中です。
――コーナーと速度に合わせて、車体の寝かし角を自動で最適化するという考えは?
秋元 そこまでやってしまうと、ライダーが意のままに操れなくなり楽しくありません。
――格納式の補助輪が追加されたり、何かアームのようなものが出てきて自動的に起き上がったり、そんな裏技的技術開発は?
秋元 それは考えていません。
――自動運転化や無人化の開発はやっている?
秋元 やっていません。
――つまり今回発表した最新の自立バイクは、人がバイクで走る楽しさと安全性をもっと高める取り組みのひとつであり、ホンダは今後も人間ありきの考えに変化はないと?
秋元 そのとおりです。ホンダの考えは二輪も四輪もあくまで人が中心です。
●青木タカオ
モーターサイクルジャーナリスト。著書に『図解入門 よくわかる最新バイクの基本と仕組み』(秀和システム)など。『ウィズハーレー』(内外出版社)編集長。YouTubeチャンネル『バイクライター青木タカオ【~取材現場から】』
 青木タカオ氏
青木タカオ氏